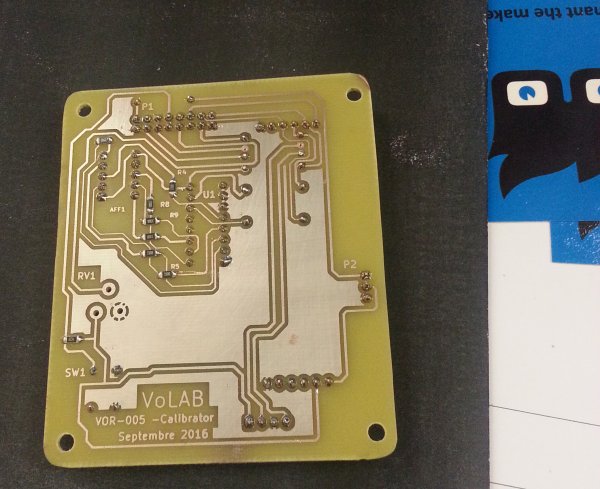
Un de plus on a envie de dire. Un PCB de plus réalisé au VoLAB. Bon c’est pas le plus beau que j’ai fait. Léger problème d’opacité du typon, la Kyocéra semble fatiguée un peu du côté du toner. mais bon ça reste potable et surtout utilisable pour le calibreur de servo moteur de VOR-005 le robot Hexapode. Verra-t-il le jour un jour se demandent certains ! En attendant avec Gilles à l’Electrolab on continue depuis quoi 1 an et demi maintenant à mettre au point El Calibrator ! lol
Au passage, on a reçu les cartes Teensy 3.2 commandé chez Snootlab. Moins d’une semaine après la commande !
Et quand on a la toute petite carte entre les mains, on se dit comment ont-ils pu chez PJRC faire rentrer toute ces fonctionnalités dedans. En même temps le choix du microcontrôleur y est pour beaucoup. Mais le travail fait autour est considérable, ça marche super bien et c’est compatible de l’IDE ARDUINO ! chapeau.
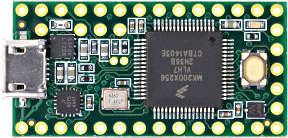
Cortex M4 à 72MHz
256k de FLash 64k de RAM (pour mémoire le UNO en a 32/2), 34 IO 5V tolérant, 2ADC pour 21 broches analogiques
12 timers et donc autant de PWM indépendantes.
3 UART, 2 I2C, une vrai sortie analogique 12 bits
Pour avoir de tellles carac, faut au moins taper un ARDUINO DUE tout ça dans moins de 4x2cm
Bon à 25€, on les réservera plutôt pour des trucs un peu tuchy comme le robot biped R-Ic de Daniel