Le week-end a été bien rempli pour les membres du lab, entre les projets personnels, les projets communs et la préparation de la Fête de la Science.
Quelques photos pour illustrer nos dernières activités : )
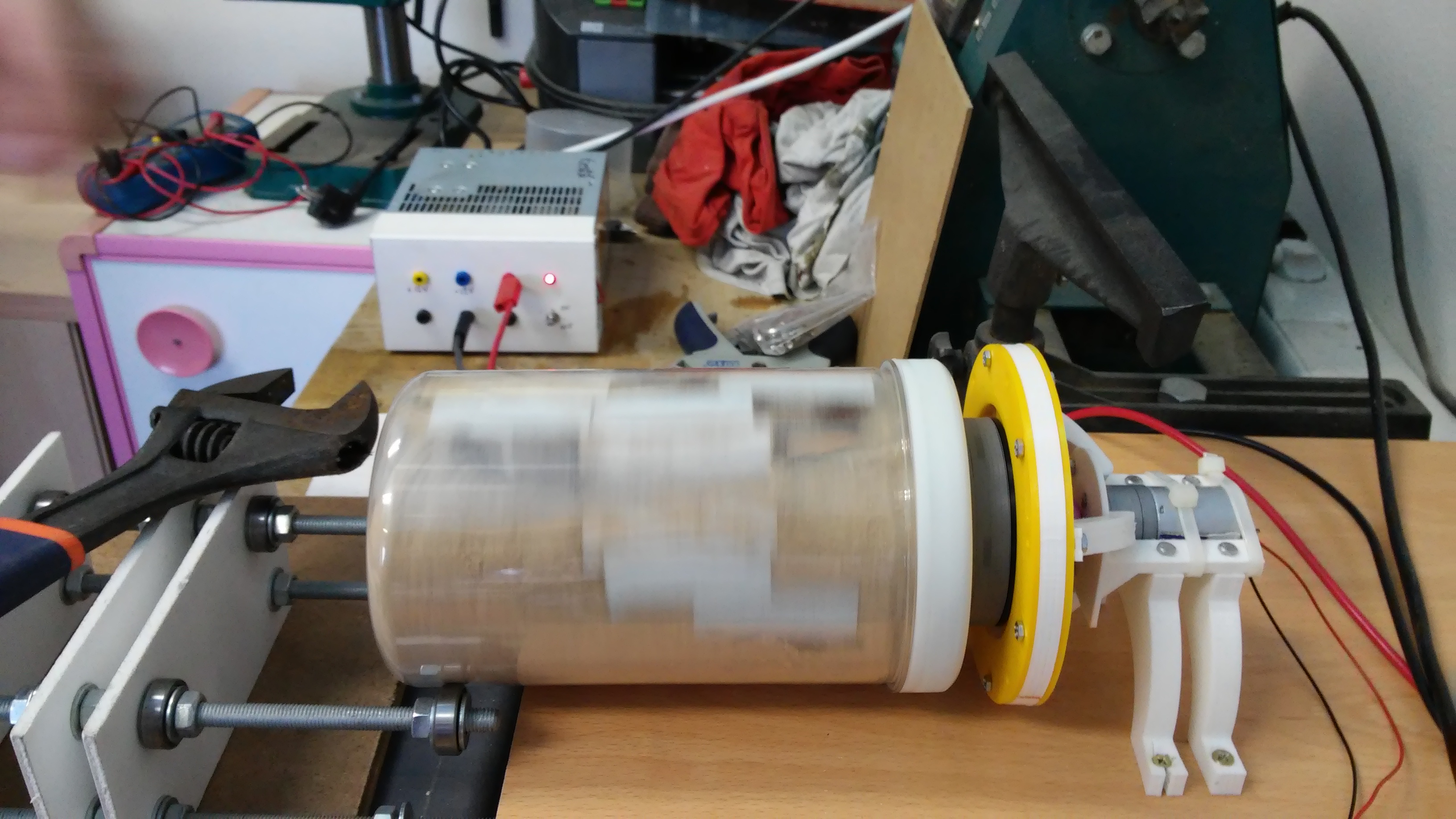
Pierre a réalisé ; du dessin, aux maths jusqu’à l’impression un train épicycloïdale, pour donner plus de couple à un moteur. Ce moteur sert à actionner une boite de gateaux apéritifs remplis de sable. Et voici notre nouvelle machine à polir, baptisée le Tonneau Infernal par son concepteur 🙂

La première photo, nous séchons le sable à l’aide d’un décapeur thermique, dans une friteuse et on le remue avec un mélangeur à peinture. Astuce : La température de surface ne doit pas dépasser les 70°C, sinon il s’envole 🙂 Cette Recette est sponsorisée par Bébert et Michel.
La seconde le Tonneau infernal en action.
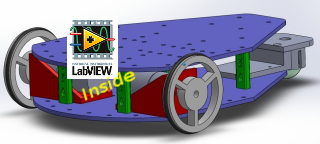
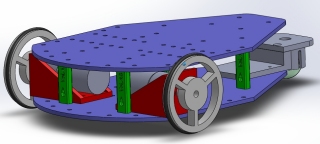
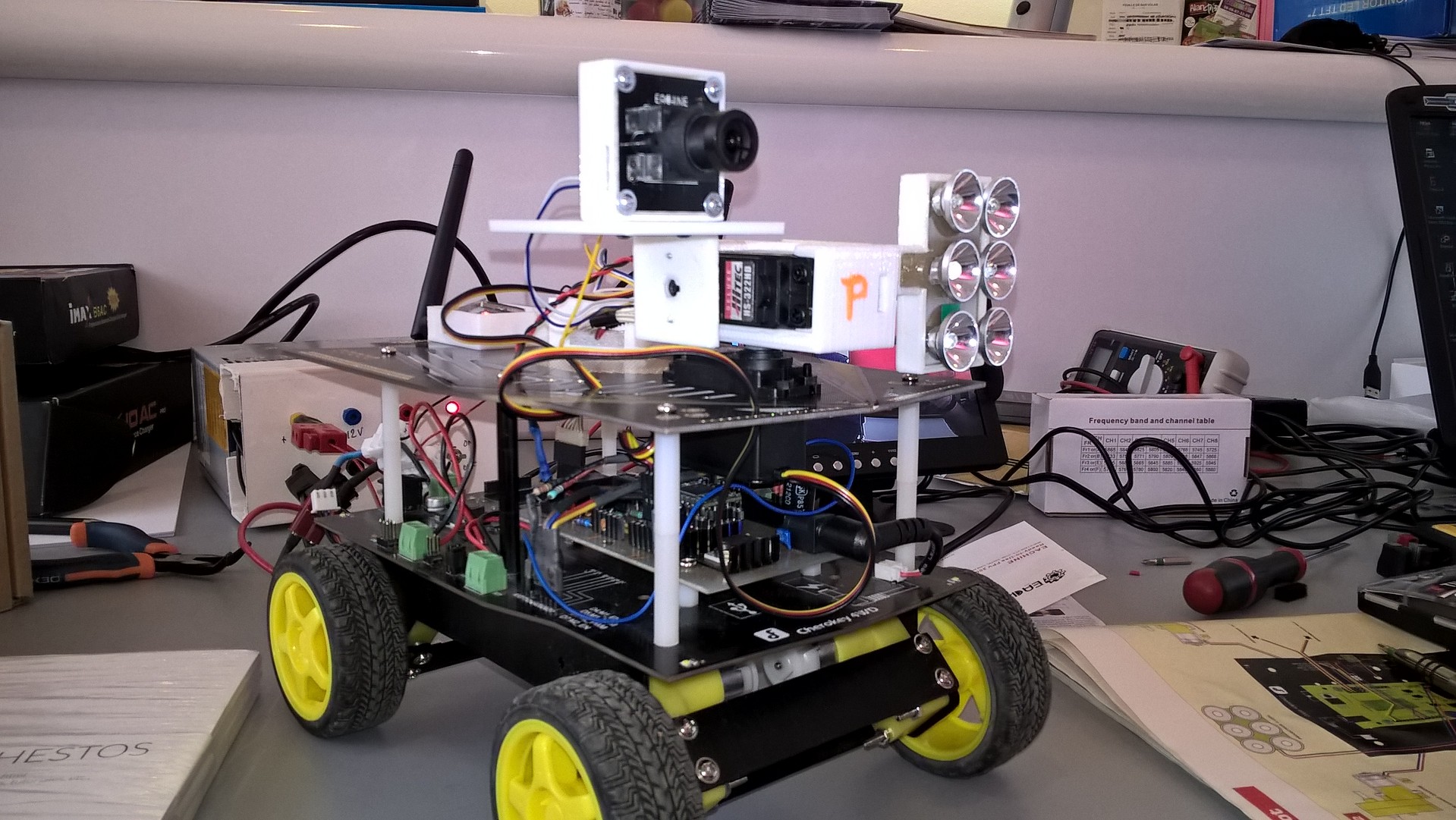
Joël a finalisé ces supers Dominoux entre autre et Gilles a travaillé sur son aéroglisseur sur aimants et moi sur VOR9, pour y installer un petit écran OLED.
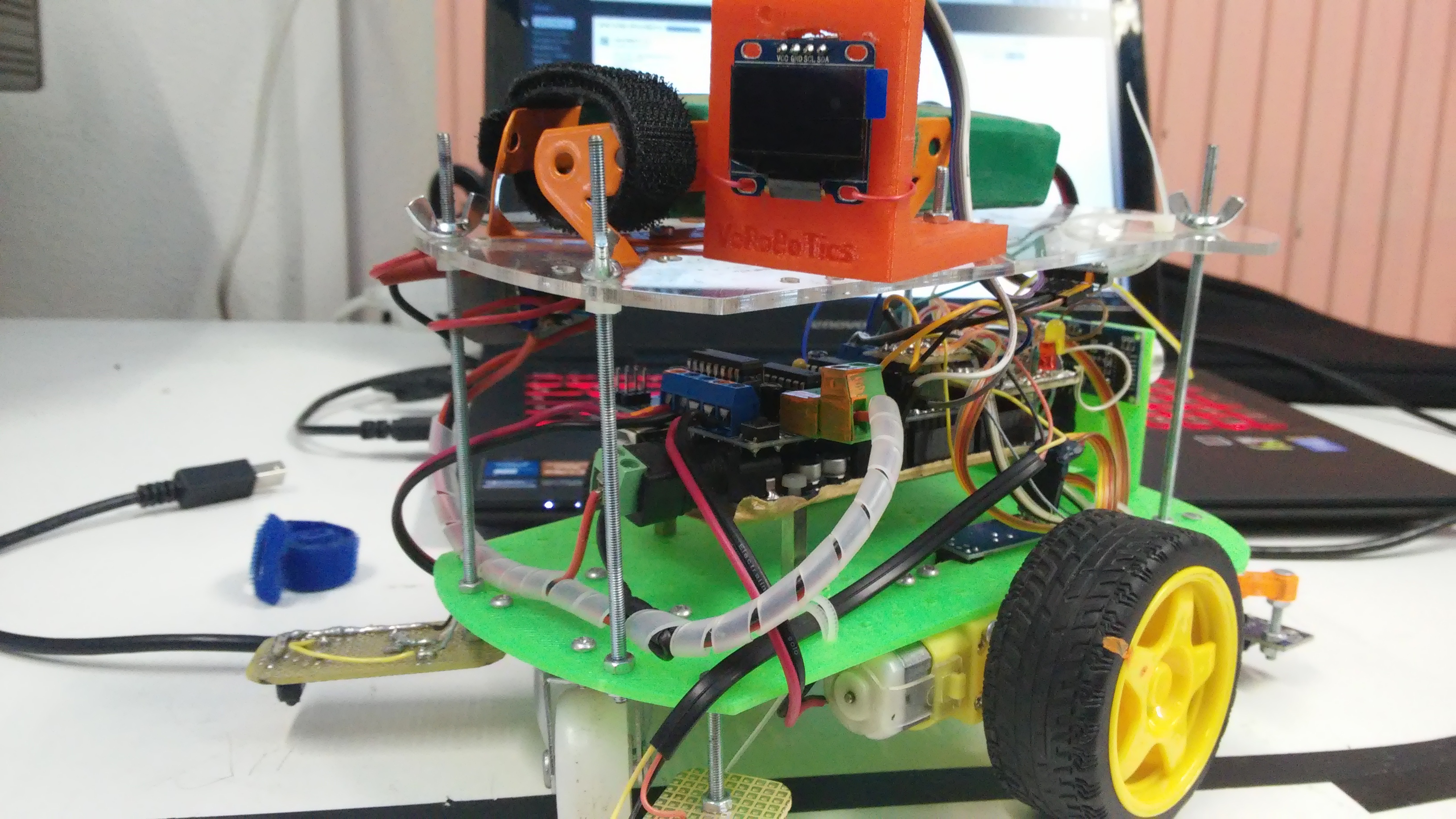
Que je vous rassure, Vor9 n’est pas tombé durant l’opération, mais Grégory m’a donné un coup de main avec l’utilisation de la librairie.
Et en bonus, une photo de notre Witbox au salon des assos 2015 de Vauréal